
Tallinna tehnikaülikool (TalTech) alustas 2017. aastal Väino Kaldoja initsiatiivil koostöös Silberauto ASi ja ABB Eesti ASiga täismõõdus isejuhtiva sõiduki arendamist ja konstrueerimist. TalTechis loodi inseneriteaduskonna vanemteaduri Raivo Selli eestvedamisel ja rektor Jaak Aaviksoo toetusel projekti juhtmeeskond ning algas teaduskonna ülese projektimeeskonna komplekteerimine. Vähem kui aastaga valmis TalTechi üliõpilaste ja Silberauto inseneride koostöös isejuhtiv minibuss, mis sai nimeks Iseauto ja tegi esimese eduka demosõidu 20. septembril 2018 TalTechi 100. aastapäeva pidustustel. Tookord olid esimesed ametlikud sõitjad rektor Jaak Aaviksoo ja Soome endine peaminister Alexander Stubb.

Projekti algusest möödus 1. juunil kaks aastat. Kuhu oleme jõudnud ja mida oleme õppinud?
Viimase-miili-bussid
Kui alles mõni aasta tagasi tegelesid isejuhtivate sõidukitega peamiselt autotootjate arenduskeskused ja huvituti üksikute isejuhtivate funktsioonide arendamisest, siis nüüd on isejuhtivate sõidukite teema jõudnud massimeedia vahendusel rahvani ja kõigil on nende sõidukite suhtes hakanud kujunema oma arvamus. Kindlasti on siin suur mõju olnud uute tegijate ilmumisel autotööstuse vanade gigantide sekka (Tesla) ja suurte IT-tehnoloogiaettevõtete panustamisel isejuhtivate sõidukite arendusse (Googleʼi Waymo, Uberi Volvo, Appleʼi Titan). Tavasõidukite kõrvale on teedele ilmunud ka isejuhtivad veokid, taksod ja viimase-miili-bussid. Need bussid on uus sõidukikategooria, mida seni on inimeste transportimiseks näha olnud peamiselt parkides, lennujaamades ja muudel kinnistel aladel. Koos isejuhtivate viimase-miili-minibussidega on avanenud lai kasutusvaldkond, kus neid saab rakendada. Viimase-miili-minibuss erineb tavasõidukist peamiselt selle poolest, et opereerib piiratud, enamasti ühe-kahe ruutkilomeetrisel alal, kus keskkond on sõidukile hästi teada ja juhtimisalgoritmid optimeeritud just selle piiratud ala eripära järgi. Sellise sõiduki tunnuseks on kõrglahutusega lidarikaartide olemasolu, kaart on salvestatud enne sõiduki autonoomset opereerimist. Tänu kõrglahutusega kaardile saab sõiduk ennast suurte staatiliste objektide abil, nt majad, puud jms, lihtsalt lokaliseerida ega vaja täpset GPSi asukohainfot. Juhul kui on ka piirkonna vektorkaart, pole vaja kasutada isejuhtivatele tavaautodele otsustava tähtsusega teekattemärgistuse ja liiklusmärkide tuvastamist. See ei tähenda, et viimase-miili-sõidukid seda teha ei võiks, kuid opereerimise kontseptsioon erineb põhimõtteliselt ja seab seetõttu ka teistsugused ülesanded, mida süsteemide arendajad selliste sõidukit puhul peavad silmas pidama.
Tase 1, 2 ja 3
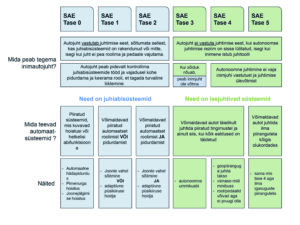
Isejuhtivad sõidukid jagatakse üldtunnustatud klassifikatsiooni SAE J3016 järgi viide kategooriasse, lisaks 0-tase, kus puudub igasugune isejuhtivus. Vastavalt taseme numbri suurenemisele suureneb ka autonoomsuse tase. Tase 1 tähendab, et meil on kasutada mingi juhiabisüsteem, nn adaptiivne püsikiiruse hoidja, stabiilsuskontroll jms. Sellised juhiabid on enamikul tänapäeva ja ka vanematel autodel. Tase 2 tähendab, et juhiabi süsteemid toimivad juba kombineeritult. Näiteks tuvastab joonejälgimise kaamera teekattemärgistuse ja sõiduk korrigeerib rooli asendit, et püsida oma sõidurajal, või kasutades radarit ja jälgides eessõitja kiiruse muutumist muudab püsikiiruse hoidja vastavalt ka auto sõidukiirust, et vältida tagant otsasõitu. 2. taset nimetatakse ka osaliseks autonoomsuseks.
Tase 3 on aga juba tingimuslik autonoomsus. See tähendab, et auto saab sõitmisega ise hakkama, viies kokku eri andurite informatsiooni (kaamerad, radarid, auto olekuandurid) ja juhtimisotsused (kiirendus-aeglustus ja pööramine). Hoolimata sellest, et enamiku ajast saab auto üksinda hakkama, on autojuhi kohalolek vajalik ja autojuht peab olema valmis iga hetk juhtimine üle võtta, kui auto ise mingil põhjusel ohutu juhtimisega hakkama ei saa. Oluline on siin just vastutuse osa, 3. taseme puhul vastutab alati autojuht. 3. taset loetaks tihti ka kõige keerulisemaks seetõttu, et siin on tegemist jagatud vastutusega – enamiku ajast võib auto juhtida ennast ise, kuid samal ajal peab autojuht kogu aeg valvel olema, et vajaduse korral juhtimine üle võtta. Suurim probleem on siin selles, et autojuhil on väga raske koondada oma tähelepanu liiklusele, kui ta tegelikult enamiku ajast ei pea juhtimisega tegelema. Proovige ise kõrvalistujana näiteks teel Tartust Tallinna olla sajaprotsendilises valmisolekus juhtimine üle võtta. Seda suudavad vist ainult autoõpetajad, kuna see on nende igapäevatöö.
Tase 4
Lähtuvalt keerukast jagatud vastutuse olukorrast on arendajatel tihti 4. taseme isejuhtivaid sõidukeid isegi lihtsam arendada – pole vaja arendada süsteeme kahele väga erinevale juhile (tehisintellekt ja inimene) ning pole vaja muretseda kiire juhtimise üleandmise pärast ühelt teisele. 4. taseme sõidukid on juba täielikult isejuhtivad ja üldjuhul puuduvad neil ka tavajuhile vajalikud seadmed (nn rool, pedaalid ja kõik muud juhtimisvahendid), kuid on üks oluline lisatingimus, nimelt on sõiduk täielikult isejuhtiv teatud tingimustel. „Teatud tingimused“ tähendab, et sõiduk opereerib ainult kindlal piiratud alal (viimase-miili-sõidukid), kindlatel keskkonnatingimustel (ühesuguse ilmaga Florida rannaala) või muudel piiravatel tingimustel. Piirangute seadmine võimaldab arendada täielikult isejuhtivaid sõidukeid ka väiksemate ressurssidega, näiteks TalTechi isejuhtiv minibuss Iseauto ei pea täielikult autonoomselt olema võimeline sõitma nii kiirteel, linna ummikus, tihedas lumesajus või tühjal kõrbeteel. Mõningad autotootjad on omavahelistes vestlustes isegi öelnud, et hea meelega jätavad 3. ja 4. taseme vahele ning tegelevad kohe 5. arendusega, kui aeg selleks on küps. Tase 5, nagu ka arvata võib, on täielik isejuhtivus ilma igasuguse piiranguta. Autojuhil pole juhtimisega enam mingit tegemist, mis tähendab, et inimautojuhti kui sellist enam vaja ei ole.
Tase 5
Kuulsaim sõnavõtja isejuhtivate sõidukite teemal on kindlasti Elon Musk ja enimräägitud isejuhtiva funktsiooniga sõiduk on Tesla. Elon Musk väitis oma kuulsas „Autonomy Day“ üritusel selle aasta aprillis, et Tesla uus riistvaraplatvorm ja tarkvara võimaldavad 5. taseme autonoomsuse saavutada juba 2020. aastal, mil tuuakse välja Teslal baseeruvad robottaksod. Praegu pole teadaolevalt liikluses ühtegi 5. taseme autonoomset autot. Elon Muski ennustused on tihti tõeks saanud ühe väikese erandiga – nimelt aja osas, millal midagi juhtub, on ta ülioptimistlik ja paneb tavaliselt alati mööda. Seega võib olla kindel, et niisugused sõidukid ilmuvad meie teedele ja autojuhiamet kui selline kaob, aga kindlasti ei juhtu see järgmisel aastal ja läheb veel omajagu aega, enne kui autojuhte enam üldse vaja ei ole. Sellegipoolest tasub noorematel kutselistel autojuhtidel vaikselt ümberõppele mõelda ja miks mitte näiteks tehnikaülikoolis robootikat õppida, et siis tulevikus isejuhtivaid sõidukeid arendada, hooldada või nende opereerimist planeerida.
Iseauto
Eestis on isejuhtivate sõidukitega tegeletud juba päris kaua. Esmased katsetused jäävad 2000. aastate algusse, kui Eesti ülikoolid hakkasid robootikavõistlusi korraldama ja millest hiljem kasvas välja Robotex. Hiljem on ülikoolidele lisandunud ettevõtteid, kes arendavad isejuhtivaid sõidukeid, mis on mõeldud kindla ülesande täitmiseks. Tuntuim on kindlasti Starship Technologiesʼe pakirobot, aga ka Milremi militaarrobot ja Cleveroni suurem pakiroboti prototüüp. Täismõõdus isejuhtiva auto arendusega on seni Eestis ainukesena tegelenud TalTech koos Silberauto / AuVe Techi ja ABB Eestiga. Selleks on „Iseauto“ projekt, mis käivitati kaks aastat tagasi ja mille raames lõid TalTechi üliõpilased ja Silberauto insenerid isejuhtiva 4. taseme viimase-miili-sõiduki prototüübi. Sellega „Iseauto“ projektiarendus ei lõppenud. Üllatuslikult, või siis ka mitte, sai Iseauto väga suure tähelepanu osaliseks nii Eestis kui ka välismaal, nii et 2018. aasta lõpp ja 2019nda algus möödusid meil ühelt näituselt teisele käies ning „Iseauto“ presenteerimisega konverentsidel ja esitlustel. Jõudsime jaanuaris ära käia Brüsselis, kus Euroopa tööstuse päevade aegsel konverentsil oli Iseauto kõige ligitõmbavam eksponaat, mida käisid uudistamas Euroopa Liidu direktoraatide direktorid. Lisaks tegime aprillis vähendatud kujul Iseauto tutvustuse USAs Washingtonis, kus osalesime Iseauto 3D-prinditud mudeliga tulevikutehnoloogia tippkohtumise konverentsil ja tegime Eesti saatkonnas demoürituse „TalTech ja isejuhtivate sõidukite arendus“.
Nüüdseks on just valminud Iseauto versioon 1.1, mida näidati mai lõpus esimest korda avalikkusele London City linnapea külastuse ajal. Seega kui esimese Iseauto esimene vipp-katsetaja koos rektoriga oli Alexander Stubb, siis teise Iseauto esimene ametlik reisija koos rektoriga oli Peter Estlin, kelle ametinimetus on The Lord Mayor of City of London.

Iseauto.taltech.ee
TalTechi Iseauto erineb teistest analoogilistest viimase-miili-bussidest (Easymile, Navya, Olli) peamiselt selle poolest, et kasutame avatud lähtekoodiga tarkvara ja meie sõiduk on võrreldes teistega ka natuke kitsam ja kergem. Nende omaduste tõttu on meie bussi vastu suurt huvi hakanud tundma USAs asuvad ülikoolid ja organisatsioonid. Mais sõlmisime koostöömemorandumi Florida polütehnilise ülikooliga (Florida Poly) koostööks isejuhtivate sõidukite valdkonnas. Florida Poly uurimisrühm tegeleb isejuhtivate sõidukite valideerimis- ja testimismetoodika arendusega ning neile pakub suurt huvi katsetada oma metoodikat meie isejuhtiva sõiduki peal. Kinniste süsteemide korral (mis on kasutusel enamikul isejuhtivatel sõidukitel) on see keeruline, kuna eeldab juriidilisi kokkuleppeid ja spetsiifiliste tark- ja riistvaraliideste arendamist. Vabavaralise lahenduse korral on see aga lihtne – pole vaja juriidiliselt siduvaid lepinguid ja liidesed võivad olla universaalsed, mitte ainult konkreetse sõiduki spetsiifilised. Ka meile on väga kasulik, kui saame oma sõidukit testida ja valideerida simulatsioonikeskkondades, kus on võimalik katsetada tuhandeid liiklusolukordi, et tuvastada riskantsemad ja ohtlikumad juhud. See võimaldab ennetada ohtlikke olukordi ja vastavalt täiendada oma juhttarkvara. Ka on vaja kontrollida simulatsioonimudeleid, mida saame meie omalt poolt pakkuda.
Teine suurem koostöö USAs on meil planeerimisjärgus Clemsoni ülikooli ja Lõuna-Carolina osariigis paikneva rahvusvahelise transpordi innovatsiooni keskusega (International Transportation Innovation Center, ITIC). Koos ITIC meeskonnaga korraldame töötoa Greenville’is, et valmistada ette Iseauto USA versiooni tootmist. Kui kõik läheb plaanide kohaselt, on Iseauto USA versioon esitlemiseks valmis 2020. aastal ja läheb demosõitudel käiku nii Lõuna-Carolinas kui ka Floridas.
Väga haruldane projekt
„Iseauto“ on Eesti mõistes unikaalne projekt, mida on algselt finantseeritud ülikooli ja Eesti ettevõtte võrdsest rahalisest panusest eesmärgiga suurendada insenerierialade populaarusust ja pakkuda üliõpilastele tipptehnoloogial põhinevat praktilist õpet. Iseauto valmimisega ei ole seni olnud seotud Euroopa Liidu projektid ega ettevõtte kommertshuvi. Projektiga hiljem liitunud ABB panustas oma inseneride töötundidega, aidates arendada turvalahendust ja pakkudes seeläbi inseneridele rutiinsetest tööülesannetest erinevaid ülesandeid. Pärast ootamatult ka rahvusvaheliseks edulooks saamist otsustasime, et peale teadus-arendus- ja õppeotstarbe hakkame arendama ka meie Iseauto võimalikku kommertsversiooni. Selleks loodi Silberauto isejuhtiva sõiduki üksuse alusel eraldi ettevõte AuVe Tech OÜ, kes on praeguseks üle võtnud Silberauto rolli „Iseauto“ projektis ja on TalTechi partner isejuhtivate sõidukite arenduses.
Projektis osaleb edasi ka ABB Eesti, panustades mootorite juhtsüsteemide arendusse ja jätkates turvakontrolleri arendust.

Just turvalisus on üks peaküsimusi viimase miili isejuhtivate sõidukite toomisel linnakeskkonda. Turvalisus tähendab tehnoloogilist turvalisust – süsteemid peavad hakkama saama sõiduki juhtimisega nii riist- kui ka tarkvara tasemel – ja ka sotsiaalset turvalisust. Sotsiaalne turvalisus tähendab, et nii sõitjad kui ka jalakäijad, kes satuvad isejuhtiva sõidukiga lähestikku, tunneksid ennast turvaliselt. Sellest ei piisa, kui isejuhtiv sõiduk on tehnoloogiliselt turvaline, aga inimesed nii sõidukis kui ka jalakäijana tunnevad ennast ohustatuna või ei saa aru, mida sõiduk teeb. Sõiduki ja jalakäija suhtlus on omaette huvitav teadus ja tavaolukordades toimib tihti autojuhi ja jalakäija vahel silmside – jalakäija veendub, et juht on teda märganud ja laseb üle tee minna. Isegi kui jalakäijal on õigus teed ülekäigurajal ületada, tahab ta veenduda, et ka autojuht on teda märganud. Kui aga autojuhti enam sõidukis ei ole, on jalakäija uues tundmatus olukorras. Kuidas veenduda, et isejuhtiv sõiduk on aru saanud, et jalakäija plaanib ületada sõiduteed? TalTechis oleme teinud vastavaid eksperimente ja arendanud oma Iseautole erilised tuled, mis võimaldavad peale tavafunktsiooni (valgustus, pidurdustuled, suunatuled) kuvada ka visuaalseid signaale. Näiteks, kui oleme tuvastanud ülekäigurajal inimese, muutuvad tuled rohelisteks animeeritud noolteks, andes märku, et jah, ma näen sind, võid turvaliselt üle tee minna. Samuti kui mõni inimene eirab liiklusreegleid ja üritab joosta bussi eest läbi selleks mitte ette nähtud kohas, siis isejuhtiv sõiduk sarnaselt normaalse autojuhiga ei aja jalakäijat külmalt alla (sest liikluseeskiri annab sõidukile õiguse), vaid aeglustab turvaliselt, signaliseerides jalakäijale punaste ristidega, et jah, ma näen sind, aga sa ei tohi siin teed ületada.
Oleme jõudnud arengufaasi, kus tehniliselt on isejuhtivad sõidukid võimalikud ja andurid on arenenud sellisele tasemele, et ei ole enam ulmeliselt kallid ning neid kombineerides saame piisava infohulga, et autot turvaliselt autonoomselt juhtida. See aga ei tähenda, et probleem oleks lahendatud. Kuigi tehnoloogia on olemas, peavad kõik alamsüsteemid omavahel töökindlalt integreeritult töötama ja see on juba keerulisem probleem, millega nii autotööstus, ülikoolid kui ka tehnoloogiaettevõtted palavikuliselt tegelevad. Samm-sammult integreeritakse järjest rohkem isejuhtivaid süsteeme tavasõidukitesse ja isejuhtivuse tase tõuseb.
Võib olla peaaegu kindel, et niisugused sõidukid ilmuvad meie teedele ja autojuhiamet kui selline kaob, aga kindlasti ei juhtu see järgmisel aastal ja läheb veel omajagu aega, enne kui autojuhte enam üldse vaja ei ole
Kuhu edasi?
Kuhu edasi, kui 5. tase on saavutatud? Juba praegu on üheks suureks valdkonnaks, millega tegeletakse, keskkonnasõbralik, ühendatud autonoomne sõit (clean, connected automated driving, CCAD) ja liikuvus kui teenus (Mobility as a Service, MaaS). See tähendab, et peale isejuhtivuse on sõidukid ka omavahel ühendatud, kasutavad puhast taastuvat energiat ja pakuvad liikuvusteenust. Ühendatavus võimaldab optimeerida energiakasutust, vähendada liiklusummikuid ja rakendada efektiivset logistikat. Liikuvus kui teenus tähendab, et sõidukit ei pea ilmtingimata enam omama, vaid kui on tagatud kvaliteetne teenus, saab isejuhtiv auto viia inimese soovitud tingimustel punktist A punkti B ega ole vaja muretseda auto hoolduskulude, parkimise vms üle. Selle nimel käib arendustegevus ka TalTechi isejuhtivate sõidukite laboris, kus hakatakse Iseauto põhjal uurima 5G-võrgu potentsiaali ühendatud sõidukite ja pilvepõhise logistika rakenduste vallas.
Koos sõidukite omavahelise suhtlusega on vaja ühtsesse võrku ühendada ka taristuobjektid, nt nutikad liiklusmärgid või teekatteelemendid, teised robotsõidukid, nt pakirobotid ja ka inimeste juhitud sõidukid, nt elektrirattad. Kõik see võimaldab arendada välja täiesti uusi kontseptuaalseid lahendusi, mis teevad liikumise mugavaks ja turvaliseks. Liikuvus on üks oluline osa targa linna kontseptsioonist, mida TalTech hakkab lähema kümne aasta jooksul ellu viima kaksiklinna projekti „FINEST Twins“ raames. Tahame maailmale näidata, kuidas sellised lahendused toimivad piiriüleselt kahes targas linnas – Tallinnas ja Helsingis. Tihti on takistavateks teguriteks hoopis juriidiline keskkond ja väljakujunenud protsessid, mida on vaja muuta ja uuendada, et saada maksimaalne kasu targa linna rakendustest. Seepärast vajame peale tehnoloogia ka paindlikke seadusi, omavalitsuste otsustusvõimet ning elanikkonna innovaatilisust ja valmisolekut uute tehnoloogiate rakenduseks.
Eesti ja Soome on siin kindlasti maailmas esirinnas ja targa linna initsiatiiviga tahame seda näidata ka muule maailmale. Kuid see saab võimalikuks ainult siis, kui on turvalised tehnoloogilised lahendused ja inimesed, kes neid lahendusi arendavad ja ellu viivad. Tallinna tehnikaülikooli inseneri- ja IT-erialad on otsustava tähtsusega Eesti tehnoloogilises edasiarendamises ning noored, kes nendele erialadele õppima asuvad, on valinud endale põnevaima ja perspektiivseima eriala.
Raivo Sell on „Iseauto“ projektijuht, TalTechi mehaanika ja tööstustehnika instituudi tootearenduse ja robootika programmijuht-vanemteadur.